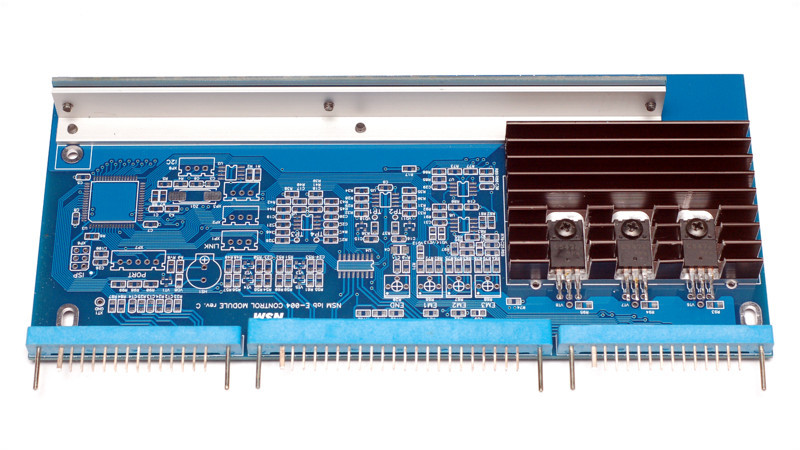
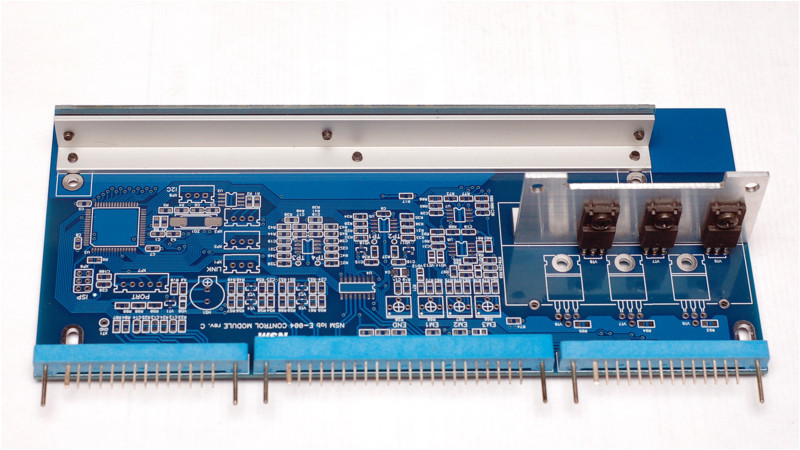
Блок управления на микроконтроллере

Новый блок управления (БУ) предназначен для замены штатного БУ в магнитофоне «Электроника-004». Он также может быть использован в магнитофонах «Электроника-003» и «Олимп-003» (но там, возможно, придется поменять распайку разъемов или изготовить переходник). Основой БУ служит микроконтроллер ATmega64. БУ повторяет все функции штатного БУ, но с некоторыми исправлениями и дополнениями. Кроме того, новый БУ поддерживает пульт ИК ДУ. Подключается новый БУ с помощью штатных разъемов (2 шт. МРН-14 и 1 шт. МРН-22). На плате БУ имеется несколько дополнительных разъемов, которые могут быть задействованы в дальнейшем для реализации новых функций. Плата нового БУ устанавливается на штатное место, все кнопки управления и светодиоды размещены на прежних местах. Светодиоды используются для подсветки кнопок вместо лампочек.
- Стабилизация натяжения ленты производится с помощью программных PID-регуляторов. В результате получается нулевая статическая ошибка, а форму переходного процесса можно настроить из сервисного софта.
- Возможность индивидуальной установки натяжения для каждого из режимов, причем раздельно для левого и правого двигателей.
- Торможение двигателями. Этот режим индицируется мигающим светодиодом STOP.
- Выборка петли ленты перед включением любого режима.
- Форсированная подмотка при старте рабочего хода для уменьшения колебаний натяжения ленты.
- Режим архивной перемотки с бережным отношением к ленте.
- Автостоп использует 3 вида датчиков: датчики натяжения ленты, датчик окончания ленты (ДО) и датчик движения ленты (ДД). Гибкий настраиваемый алгоритм автостопа позволяет добиться минимального неконтролируемого вращения катушек после окончания ленты. После воспроизведения оно вообще исключено, после перемоток определяется возможностью механических тормозов.
- ДО работает по перепаду уровня, что делает возможным старт с прозрачного ракорда или перемотку с заправкой ленты над блоком головок.
- Сигнал ДО фильтруется с настраиваемой постоянной времени, что позволяет исключить влияние дефектов рабочего слоя ленты, склеек, а также полосок на ракорде.
- Управление всеми электромагнитами с форсирующим импульсом. Ток удержания для каждого электромагнита регулируется отдельно, что позволяет установить его минимальное значение. В результате снижается нагрев и поле рассеяния электромагнитов. К тому же, ток удержания стабилизирован и не содержит пульсаций сетевой частоты, что уменьшает уровень наводок.
- Настраиваемые функции кнопок. Кнопка REC может автоматически включать паузу, кнопка PLAY может выключать паузу, кнопка ROLLBACK может включать режим обзора (CUE) во время архивной перемотки.
- Настраиваемые режимы индикации: светодиод PAUSE может мигать или гореть постоянно.
- Индикация светодиодом STOP наличия ленты.
- Поддержка пульта ДУ.
- Возможность дальнейшего расширения набора функций при условии доработки других узлов магнитофона.
- Логика управления имеет некоторые изменения и дополнения, которые описаны в конце этой страницы.
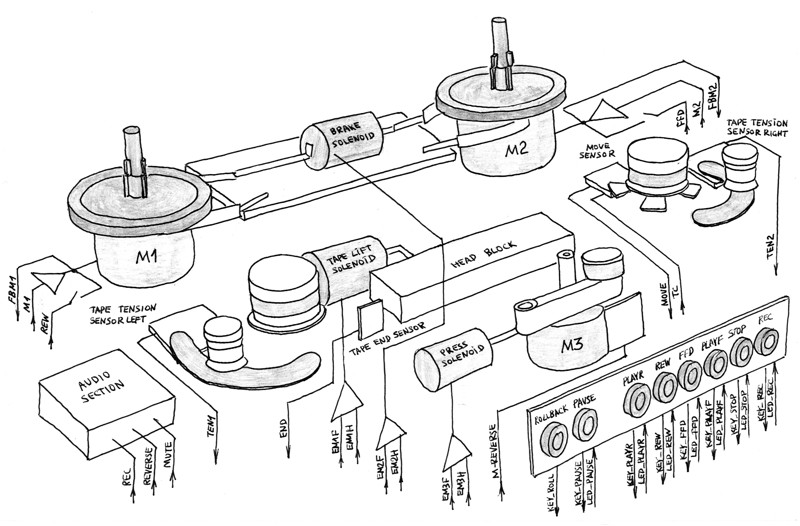
Выше приведена блок-схема БУ, где подписаны входные и выходные сигналы.
Для управления боковыми двигателями (M1 и M2) используются сигналы M1 и M2, которые поступают на регулирующие транзисторы двигателей. С коллекторов этих транзистор на БУ поступают сигналы обратной связи FBM1 и FBM2. В режиме перемоток боковой двигатель на управляющей стороне не управляется, на него через симистор подается повышенное напряжение (100 В), который включается с помощью сигнала FFD или REW.
Ведущий двигатель (M3) имеет свой собственный контроллер. От БУ требуется только один сигнал – реверс (M-REVERSE). Выбор скорости производится механическим переключателем без участия БУ.
ЛПМ имеет 3 электромагнита: EM1 (Tape Lift Solenoid) – отвод ленты от головок в режиме перемотки, EM2 (Brake Solenoid) – отвод тормозных лент, EM3 (Press Solenoid) – прижим ролика. Для каждого электромагнита формируется стартовый импульс, после которого подается пониженный ток удержания (в оригинальном БУ такое управление было только у электромагнита ролика). Поэтому для управления каждым электромагнитом требуются два сигнала: Force и Hold. Всего их шесть: EM1F, EM1H, EM2F, EM2H, EM3F, EM3H.
Для контроля окончания магнитной ленты имеется специальный оптический датчик (Tape End Sensor). Он формирует сигнал END, который поступает на БУ.
Для контроля движения ленты имеется индуктивный датчик, который реагирует на лопасти крыльчатки, расположенной под правым обводным роликом. Он формирует сигнал движения ленты (MOVE). В режиме перемотки постоянную времени этого датчика можно уменьшить с помощью специального сигнала (TC).
Аналоговый тракт магнитофона управляется с помощью трех логических сигналов: блокировка УВ (MUTE), включение реверсного канала (REVERSE) и включение режима записи (REC). Остальные переключения и регулировки производятся кнопками и регуляторами с передней панели без участия БУ.
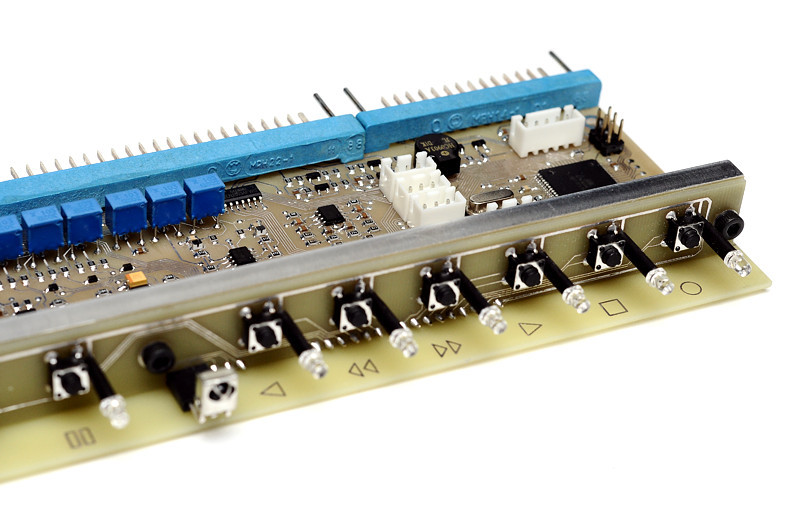
Управление ЛПМ магнитофона осуществляется кнопками с передней панели. Всего имеется 8 кнопок. В семи из них находятся светодиоды подсветки. Поэтому для управления задействовано 8 входных сигналов для кнопок и 7 выходных сигналов для светодиодов. Сигналы следующие: кнопка «Откат» (KEY_ROLL), «Пауза» (KEY_PAUSE, LED_PAUSE), «Воспроизведение назад» (KEY_PLAYR, LED_PLAYR), «Перемотка назад» (KEY_REW, LED_REW), «Перемотка вперед» (KEY_FFD, LED_FFD), «Воспроизведение вперед» (KEY_PLAYF, LED_PLAYF), «Стоп» (KEY_STOP, LED_STOP), «Запись» (KEY_REC, LED_REC).
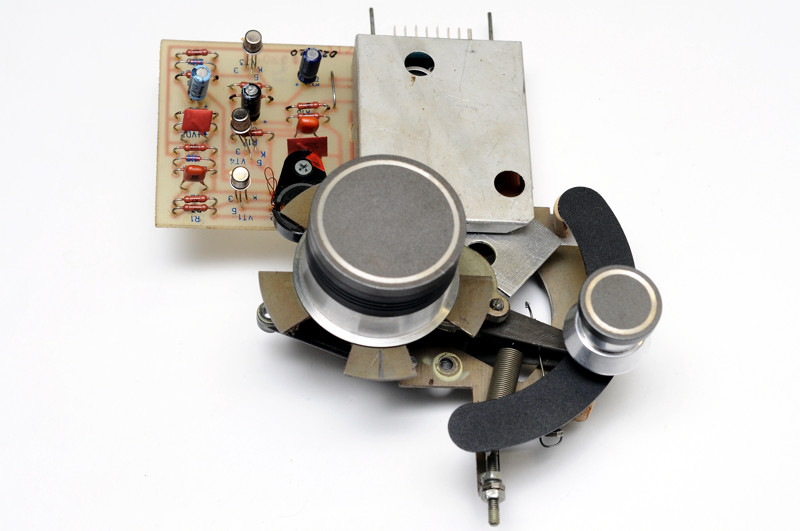
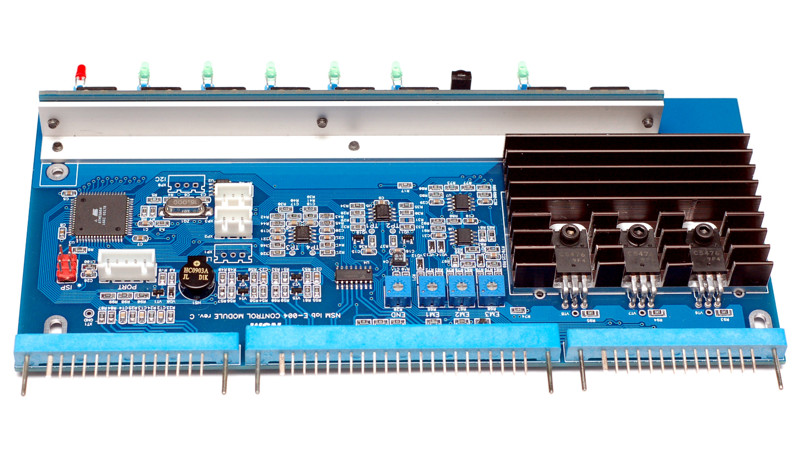
На плате нового БУ дополнительно имеется приемник ИК ДУ, а также ряд сигналов и интерфейсов для связи с будущими новыми блоками.Датчики натяжения ленты выполнены в виде роликов на подпружиненных рычагах. Ролики огибаются лентой, под действием силы ее натяжения рычаги отклоняются. От угла отклонения рычага зависит относительное удлинение пружины и сила, действующая на рычаг.

К рычагу прикреплена алюминиевая шторка специальной формы, которая входит в зазор между двумя половинками ферритовой чашки Б14. В каждой половинке размещена обмотка. Одна из обмоток питается от генератора частотой примерно 1.3 МГц, другая подключена к детектору. Когда между половинками сердечника вдвигается шторка, связь между обмотками падает и напряжение на выходе датчика уменьшается. Шторка входит в зазор при поднятии рычага, поэтому чем больше натяжение ленты, тем меньше напряжение на выходе. Полярность выходного напряжения в штатных датчиках натяжения магнитофона "Электроника-004" - отрицательная. Выходное напряжение датчиков поступает на вход системы автоматического регулирования (САР) натяжения ленты. САР управляет напряжением питания боковых двигателей таким образом, чтобы поддерживать выходное напряжение датчиков натяжения постоянным. При этом будет постоянным и натяжение ленты, но с точностью до погрешностей, о которых будет сказано ниже.
В датчике используются две пружины разной жесткости. При отклонениях рычага до +10° (считая от горизонтального положения) работает мягкая пружина.
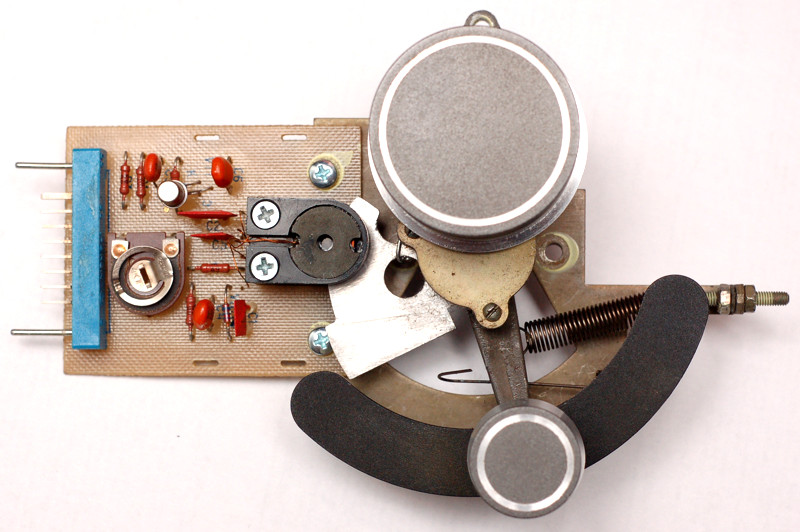
При отклонениях больше +10° к ней добавляется вторая пружина, более жесткая.
Дополнительно датчик содержит демпфер в виде емкости, заполненной вязкой силиконовой жидкостью. На фото видна ее крышка с тремя винтами. Внутри емкости поворачивается пластмассовая шайба, связанная с рычагом. Благодаря вязкому трению свободные колебания рычага демпфируются.
Зависимость величины отклонения рычага от силы, приложенной к оси ролика вертикально (F1), можно измерить с помощью динамометра. Полученные данные занесены в таблицу: колонка 1 - это угол отклонения рычага, колонка 2 - величина приложенной вертикально силы.
| a1, ° | F1, гс | a2, ° | a3, ° | T, гс | V, V |
| 30 | 525 | 90 | 6.7 | 470.148 | 0.00 |
| 25 | 425 | 90 | 9.7 | 363.717 | 0.03 |
| 20 | 330 | 90 | 13.0 | 269.399 | 0.47 |
| 15 | 230 | 90 | 16.3 | 179.594 | 1.10 |
| 10 | 145 | 90 | 19.7 | 108.444 | 1.45 |
| 5 | 125 | 90 | 23.0 | 89.881 | 1.60 |
| 0 | 120 | 90 | 26.5 | 82.976 | 1.71 |
| -5 | 115 | 90 | 30.0 | 76.667 | 1.82 |
| -10 | 110 | 90 | 33.4 | 70.946 | 1.96 |
| -15 | 105 | 90 | 36.8 | 65.665 | 2.13 |
| -20 | 100 | 90 | 40.4 | 60.675 | 2.30 |
| -25 | 95 | 90 | 44.0 | 56.058 | 2.45 |
| -30 | 90 | 90 | 48.0 | 51.631 | 2.53 |
Зависимость величины отклонения рычага от силы F1 показана на графике ниже (красный график).
На графике видны два практически линейных участка: при отклонениях рычага от -30° до +10°, когда работает мягкая пружина, и от +10° до +30°, когда к ней добавляется жесткая пружина. Рабочее натяжение ленты обеспечивается на первом участке, а второй участок служит для сглаживания колебаний натяжения в переходных режимах. Середина первого участка соответствует отклонению рычага -10°, именно это положение указано как номинальное в сервис-мануалах магнитофонов Studer, являющихся прообразом ЛПМ данного магнитофона. Пружина рычага натяжителя должна быть отрегулирована так, чтобы при номинальном положении рычага обеспечивалось номинальное натяжение ленты. Для бытового аппарата, работающего в основном с лентами толщиной 35 мкм, это натяжение составляет порядка 70 гс.
Вертикальная сила, действующая на рычаг натяжителя, не равна натяжению ленты. Геометрия тракта такова, что углы обхвата ролика натяжителя лентой зависят от величины отклонения рычага. При отклонении рычага на угол a1 относительно горизонтального положения, угол обхвата ролика слева составит a2, справа - a3.

Вклад натяжения веток ленты от катушки до ролика натяжителя и от ролика натяжителя до обводного ролика в вертикальную составляющую силы F1 будет разный в зависимости от значения углов a2 и a3. Если пренебречь трением в осях роликов и считать натяжение ленты для всех веток равным T, тогда сила F1 = T * sin(a2) + T * sin(a3). Откуда T = F1 / (sin(a2) + sin(a3)). Значения углов огибания a2 и a3 для разных углов поворота рычага a1 приведены в колонках 3 и 4 в таблице выше. В колонке 5 приведены соответствующие значения натяжения ленты T. На основе этих данных можно построить график зависимости натяжения ленты от угла поворота рычага (синий график выше). Натяжение ленты всегда меньше вертикальной составляющей силы, действующей на рычаг, поскольку эту силу создают сразу две ветки ленты. В начале хода рычага (-30°) сила натяжения T = 0.89 * F1, в конце хода (+30°) T = 0.56 * F1. Довольно сложная зависимость T от F1 на графике выглядит как простое смещение графика натяжения вниз.
Следует отметить, что при данной геометрии тракта углы огибания лентой ролика зависят не только от угла отклонения рычага, но и от диаметра рулона ленты. Все расчеты выше выполнены для диаметра рулона 100 мм. Конфигурация тракта при разных диаметрах рулона показана на рисунке ниже:
Даже при неизменном угле отклонения рычагов (что и поддерживает САР натяжения) натяжение ленты все равно не будет постоянным. Оно будет зависеть от диаметра рулонов. Поэтому реализовать точную стабилизацию натяжения ленты в данном ЛПМ не представляется возможным (по крайней мере, простыми средствами). Но зависимость натяжения от диаметра рулона не такая большая. Для катушек №27 погрешность не превышает 4.5%. Минимум натяжения наблюдается в середине рулона, в начале и конце рулона натяжение растет. Для всего диапазона катушек от №10 до №27 погрешность не превышает 8.5%. Надо отметить, что штатная аналоговая САР натяжения имеет более высокую погрешность, чем погрешности, связанные с геометрией ЛПМ.
САР использует выходное напряжение датчика натяжения, которое зависит от угла поворота рычага. Вид этой зависимости задан формой шторки и конструктивными особенностями датчика. В результате эта зависимость тоже нелинейная (колонка 6 таблицы выше). Выходное напряжение датчика уменьшается при поднятии рычага. Отрицательная полярность выходного напряжения датчика здесь не показана, чтобы не запутывать картину. Вместо этого показан модуль выходного напряжения датчика. На графике данная зависимость выглядит так:
Рабочим является участок от -30° до +10°, здесь линейность выходного напряжения вполне нормальная. Зависимость выходного напряжения от натяжения показана ниже:
Рабочий участок - 50…100 гс. На этом графика он сжат, наглядней построить обратную зависимость - натяжения от напряжения:
Рабочий участок 2.5…1.5 В достаточно линеен. Номинальное натяжение 70 гс обеспечивается при напряжении датчика примерно 1.875 В, что соответствует примерно 25% диапазона графика по оси X.
Надо отметить, что нелинейность преобразования угол-напряжение не приводит к ошибке натяжения ленты. САР поддерживает выходное напряжение датчика постоянным, т.е. всегда работаем в одной точке. Нелинейность может повлиять только на устойчивость регулятора в переходных режимах. А вот геометрическая ошибка, связанная с конфигурацией тракта ленты, к ошибке натяжения приводит.
Штатная САР натяжения ленты представляет собой аналоговый пропорциональный регулятор (P-регулятор). Из-за ограниченного усиления появляется заметная погрешность. Для получения заданного натяжения при большом диаметре рулона от двигателя требуется больший момент, чем при маленьком диаметре. Поскольку диапазон изменения диаметра довольно широкий, напряжение питания двигателя тоже должно меняться в широких пределах. У P-регулятора выходной сигнал пропорционален входному, поэтому с ростом требуемого момента растет и ошибка натяжения. Ниже на графике показано изменение натяжения ленты справа и слева при проигрывании катушки №27. Ступеньки на графике связаны с тем, что проигрывались короткие фрагменты, далее снятие графика прерывалось, делалась перемотка на 10 минут вперед, затем снова снимался фрагмент и т.д.
Проблемы штатной САР заключаются не только в наличии статической ошибки натяжения. В переходных режимах наблюдаются заметные колебания натяжения ленты. Они проявляются особенно сильно на аппаратах, где жидкостные демпферы датчиков натяжения заполнены не полностью. Вот как выглядит график натяжения при включении рабочего хода:
Демпфировать колебания можно не только механическим способом, но и электронным. Реализовать это можно добавлением в P-регулятор D-компоненты. Для аналогового регулятора вся доработка заключается в добавлении одной RC-цепочки. Такая цепочка была в Revox A-700, есть она и в более поздних магнитофонах "Олимп". Но в "Электроника-004" почему-то отсутствовала.
С такой цепочкой получается PD-регулятор, колебания натяжения ленты при этом заметно уменьшаются:
Чтобы устранить статическую погрешность натяжения ленты, в регулятор надо добавить I-компоненту, превратив его в полноценный PID. Анализ схем фирменных магнитофонов показывает, что ни в одном из них такого регулятора нет. Везде применяется PD-регулятор. Единственным аппаратом с аналоговым PID-регулятором оказался "Олимп-700".
Поскольку ЛПМ "Олимп-700" не отличается от ЛПМ "Электроника-004", этот регулятор можно использовать в качестве отправной точки при создании цифрового регулятора на микроконтроллере. Параметры регулятора можно вычислить на основе номиналов, но проще их определить измерением на модели. Можно смоделировать отдельно P, I и D ветки регулятора.
В результате воздействий, показанных на схеме, на выходе получаем следующие отклики:
По откликам можно рассчитать коэффициенты для каждой из веток регулятора. Vout_p = Vin * 37; Vout_d = Vin * 138 * t; Vout_d = Vin * 1.23 / t. Диапазоны входных и выходных напряжений для аналогового и цифрового регулятора будут близки, поэтому можно надеяться, что приблизительно такие значения коэффициентов подойдут и для цифрового регулятора.
Цифровая САР натяжения реализована следующим образом. Сигналы датчиков натяжения поочередно считываются с помощью АЦП, период выборок составляет 1 мс. Несколько выборок усредняются, в результате получается период дискретизации, задаваемый константой TSAMPLE. При усреднении код АЦП приводится к диапазону 0…65535, чтобы можно было легко менять количество усреднений. Для АЦП используется внутренний ИОН, полная шкала АЦП составляет 2.56 В. Подстроечными резисторами на платах датчиков натяжения в контрольных точках TP1 и TP2 устанавливается напряжение 2.56 В при крайнем нижнем положении натяжителей (нулевое натяжение ленты). В крайнем верхнем положении (максимальное натяжение ленты) напряжение должно быть около 0 В. Код АЦП поступает на программные PID-регуляторы, которые реализованы в дифференциальной форме с использованием 32-разрядной целочисленной арифметики. Коэффициенты PID имеют диапазон 0…255 и также задаются с компьютера и сохраняются в EEPROM. Для каждого из режимов для регуляторов задается нужное образцовое значение Ref. Текущее натяжение сравнивается с образцовым, на основе величины ошибки вырабатывается величина воздействия, которая выводится в ШИМ ЦАП. Выходное напряжение ШИМ фильтруется и подается на буферный усилитель, который управляет регулирующими транзисторами боковых двигателей.
В режиме рабочего хода (SPOOL_PLAY) натяжение ленты стабилизируется со стороны каждого из двигателей по своему датчику натяжения. Коэффициенты PID подбираются по критерию гладкой переходной характеристики натяжения ленты в переходных режимах. Натяжение должно иметь минимальные выбросы, а колебания должны быстро затухать. Графики натяжения в реальном времени можно наблюдать на экране компьютера.
На графике видны короткие выбросы довольно большой, причем чаще всего одинаковой амплитуды. Они являются результатом действия D-компоненты регулятора и связаны с ограниченной разрядности АЦП (10 бит). При увеличении периода дискретизации погрешность дифференцирования снижается, выбросы тоже уменьшаются. Но эти выбросы на устойчивость или качество работы регулятора не влияют, они подавляются фильтром ШИМ, давая на выходе некоторое среднее значение.
На графиках напряжения питания двигателей видна еще и периодическая компонента, которая по частоте совпадает с частотой вращения катушек. Она связана с эксцентриситетом катушек, неравномерностью момента двигателей и прочими факторами. Регулятор эффективно подавляет подобные возмущения, на графиках натяжения их практически нет.
В режиме рабочего хода натяжения на подающей и приемной стороне могут быть установлены разными для балансировки натяжений с двух сторон ведущего вала (с учетом роста натяжения в рабочей зоне из-за трения ленты о стойки и головки).
В режиме перемоток принимающий двигатель питается напряжением 100 В и не регулируется. Подающий двигатель регулируется по датчику натяжения на принимающей стороне.
В режиме архивной перемотки подающий и принимающий двигатели регулируются по датчику натяжения на принимающей стороне. Для принимающего двигателя установлено натяжение больше, чем для подающего. В результате принимающий двигатель фактически питается напряжением 60 В, в случае необходимости оно снижается для ограничения натяжения на заданном уровне. Подающий двигатель поддерживает заданное натяжение для равномерной намотки ленты на катушку.
В режиме торможения двигателями натяжение регулируется так же, как в режиме рабочего хода. Натяжения справа и слева должны быть установлены одинаковыми, чтобы лента при остановке находилась в равновесии.
Для каждого из режимов и для каждого двигателя натяжение может быть установлено индивидуально с помощью сервисной программы. Натяжение задается в процентах относительно полного хода рычагов натяжителей. Задаются следующие натяжения: Brake (торможение двигателями), PlayF (рабочий ход вперед), PlayR (рабочий ход назад), FFD (перемотка вперед), REW (перемотка назад), AFFD (архивная перемотка вперед), AREW (архивная перемотка назад), Autostop (минимальное натяжение, при достижении которого будет срабатывать автостоп).
Управляющее напряжение для боковых двигателей формируется с помощью ШИМ. Для достижения компромисса между точностью и временем установления фильтра, используется 14-разрядный ШИМ. Код ШИМ приводится к диапазону 0…65535, чтобы в случае необходимости можно было просто поменять разрядность ШИМ. Частота ШИМ-сигнала составляет около 1 кГц. Диапазон выходного напряжения ШИМ равен напряжению питания процессора, поэтому используется резисторный делитель для приведения его к диапазону 0…2.56 В. После деления сигнал фильтруется с помощью ФНЧ 3-го порядка с частотой среза около 30 Гц. Подавление на частоте ШИМ составляет более 80 дБ.
Характеристика фильтра подобрана так, чтобы минимизировать выброс на переходной характеристике, который не превышает 1% (для сравнения, у фильтра Баттерворта он составляет около 9%). Время установления фильтра по уровню 0.9 - около 15 мс.
С выхода фильтра (контрольные точки TP3 и TP4) управляющий сигнал поступает на выходной каскад, собранный на двух транзисторах разной структуры. Этот каскад формирует требуемый ток базы для регулирующего транзистора. Чтобы иметь возможность регулировать переменное напряжение питания двигателей, регулирующий транзистор включен в диагональ диодного моста, включенного в цепь двигателя. Поскольку эмиттер регулирующего транзистора должен быть заземлен, требуются раздельные обмотки для питания каждого из боковых двигателей.
Оба транзистора выходного каскада БУ включены с ОЭ, что позволяет получить на выходе размах напряжения, близкий к напряжению питания (несмотря на то, что на выходе ОУ активного фильтра размах напряжения заметно ниже). Это необходимо для того, чтобы иметь возможность питать выходной каскад от источника +5 В и не нагружать источник аналогового питания +15 В пульсирующим током.
Ток базы регулирующего транзистора промодулирован в форме модуля синуса, что дает минимальные искажения формы тока, питающего двигатель. Модуляция осуществляется за счет сигнала обратной связи (FBM1, FBM2), поступающего через резисторы с коллектора регулирующего транзистора. Кроме того, добавлено напряжение смещения, которое минимизирует нелинейность, связанную с падением напряжения на переходе Б-Э регулирующего транзистора. Различные способы питания боковых двигателей были рассмотрены ранее в статье "Доработка боковых двигателей".
В магнитофоне «Электроника-004» применен синхронный ведущий двигатель ДБ-95. Управление этим двигателем (коммутацию фаз, стабилизацию частоты вращения) осуществляет отдельный блок управления ведущим двигателем (БУВД). Выбор скорости осуществляется без участия БУ, сигнал поступает непосредственно с механического переключателя, который находится на передней панели. Задачей БУ является лишь управление направлением вращения с помощью логического сигнала. При смене направления вращения двигателю требуется некоторое время для установления скорости, поэтому БУ реализует задержку при включении реверса.
Штатный БУВД имеет ряд недостатков. Например, в нем нет кварцевой стабилизации частоты вращения двигателя. А сам блок собран на устаревшей серии TTL-микросхем. Доработка штатного БУВД приведена в статье "Кварц в «Электроника-004»". Доработка вместе с кварцевой стабилизацией дает возможность детектировать с помощью сигнала LOCK готовность двигателя (конец разгона), а также выключать двигатель в режиме ожидания.
В ЛПМ магнитофона "Электроника-004" используются 3 соленоида: для привода рычага прижимного ролика (Press Solenoid), механизма тормозов (Brake Solenoid) и стоек отвода ленты при перемотке (Tape Lift Solenoid).
Обычно при управлении соленоидами предусматривают ступенчатую подачу питания: сначала подают стартовый импульс напряжения, а спустя некоторую задержку (на срабатывание соленоида) подают пониженное напряжение удержания. Такой способ управления в штатном БУ применен лишь для соленоида прижимного ролика. Остальные соленоиды постоянно питаются пусковым напряжением. Недостатком такого способа управления является повышенное потребление энергии, повышенный нагрев обмотки соленоида, а также повышенное поле рассеяния. Как показали эксперименты, для всех соленоидов можно значительно снизить напряжение питания в режиме удержания.
Измеренные параметры соленоидов приведены в таблице:
| Соленоид | R, Ом | L, мГн | Vcраб., В | Vотп., В |
| EM1 (Lift) | 120 | 190 | 13.5 | 2.4 |
| EM2 (Brake) | 270 | 260 | 34.0 | 4.3 |
| EM3 (Press) | 120 | 190 | 22.0 | 2.5 |
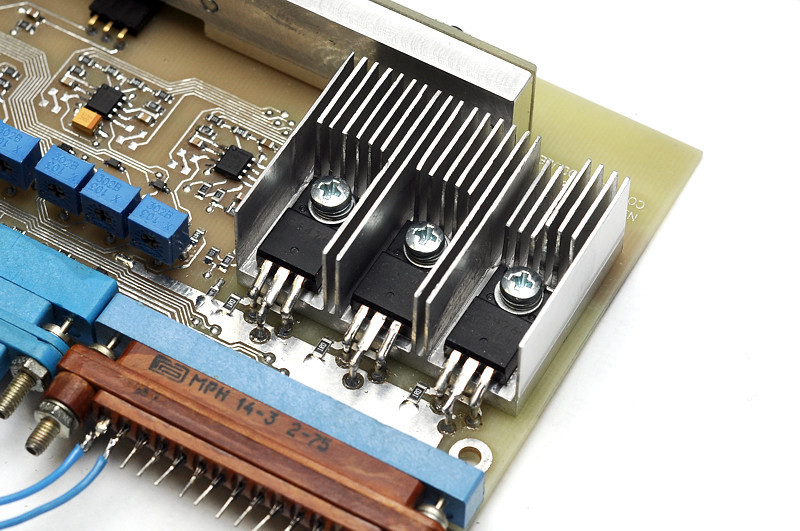
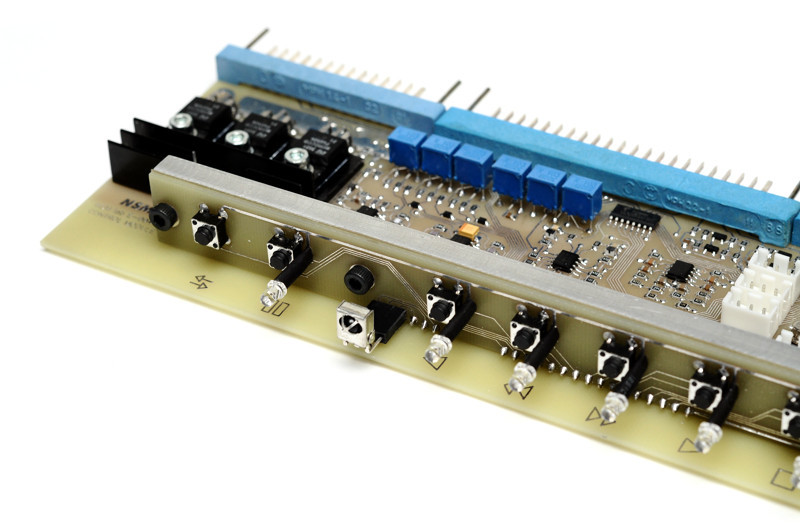
В штатном БУ для двухступенчатого управления электромагнитом прижимного ролика используются два транзисторных ключа и балластный резистор. В новом БУ для управления каждым из электромагнитов используется активный генератор тока, который обеспечивает необходимый пусковой ток и пониженный ток удержания. Величина тока удержания регулируется для каждого электромагнита индивидуально с помощью подстроечного резистора. Это позволяет использовать для каждого электромагнита минимально возможный ток удержания, что снижает нагрев электромагнитов и уменьшает их поле рассеяния.
Кроме того, активные генераторы тока осуществляют стабилизацию тока удержания, делая его независимым от колебаний сетевого напряжения. Стабилизация тока имеет еще одно преимущество: при этом подавляются пульсации тока сетевой частоты, что снижает уровень помех, излучаемый электромагнитами.
Из недостатков такого способа управления можно назвать необходимость использования радиатора для транзисторов генераторов тока. Та мощность, которая рассеивалась в штатном БУ на мощном резисторе, теперь рассеивается на транзисторах. Хотя эта мощность невелика (порядка 2…3 Вт), достаточно радиатора небольшой площади.
Датчик окончания ленты формирует на выходе аналоговый сигнал, который подается на вход компаратора AIN1. На второй вход компаратора AIN0 подается опорное напряжение с подстроечного резистора, который позволяет регулировать порог срабатывания.
Штатный датчик окончания ленты выполнен в виде пары излучатель-приемник света. В оригинальной конструкции в качестве источника света используется лампочка накаливания, а в качестве приемника - фотодиод. Когда лента заканчивается, фотодиод засвечивается. При этом на входе AIN1 напряжение повышается, и когда оно превысит опорное напряжение на входе AIN0, компаратор переключится в состояние ACO = 0. Это состояние означает отсутствие ленты.

Для пары в виде лампочки накаливания и фотодиода прозрачность многих ракордов не отличается от прозрачности ленты, что не позволяет определить начало ракорда, если не сделать прозрачные "окна", смыв рабочий слой.
Если перейти на пару ИК светодиод-фотодиод, то контраст ракорда увеличивается, хотя все равно находятся ленты, которые в ИК диапазоне прозрачней ракордов. В случае применения других типов излучателя и приемника света может потребоваться корректировка номинала нагрузочного резистора приемника и пределов регулировки порога.
Экспериментальные результаты исследования разных лент и ракордов приведены в статье Датчик окончания ленты.
При наличии небольших повреждений магнитного слоя ленты или склеек, могут появляться небольшие окна прозрачности. На некоторых ракордах возможна обратная ситуация - иногда на них нанесены цветные полоски, что дает чередование участков прозрачности и непрозрачности. Чтобы предотвратить ложные срабатывание датчика, предусмотрен специальный программный таймер. Он разрешает датчику реагировать только на непрерывные прозрачные и непрозрачные участки с длительностью не меньше заданной. Длительность задается в виде параметра Tau и может меняться из сервисной программы.
Датчик движения магнитной ленты реализован на плате правого датчика натяжения. Основой датчика является генератор, собранный на транзисторе и имеющий индуктивную обратную связь. Катушка обратной связи намотана вместе с контурной катушкой на половинке броневого сердечника. В обычных условиях генератор работает, частота колебаний составляет около 0.5 МГц. Когда над катушкой генератора проходит стальная лопасть крыльчатки обводного ролика, потери в контуре генератора резко возрастают, и генерация срывается (в книге Соколова и Котова сказано наоборот, хотя в описании Revox A700 все было правильно).
При вращении крыльчатки на выходе генератора присутствуют модулированные колебания, с помощью детектора выделяется их огибающая, которая имеет практически прямоугольную форму. Этот сигнал дифференцируется и подается на базу транзисторного ключа. При наличии модуляции (т.е. когда магнитная лента движется), ключ периодически открывается и поддерживает заряженным конденсатор времязадающей цепочки. При этом на выходе датчика движения присутствует ВЫСОКИЙ логический уровень. Как только модуляция прекращается (магнитная лента останавливается), конденсатор начинает разряжаться. Время разрядки определяет интервал, через который после остановки ленты на выходе будет сформирован НИЗКИЙ логический уровень.
В режиме перемотки, когда скорость ленты намного выше, постоянная времени может быть уменьшена для более быстрого детектирования остановки движения. Для этого имеется специальный контакт разъема "Постоянная времени". Он подключен к емкости времязадающей цепочки. Если подключить резистор с цепи +5 В на этот контакт, то постоянная времени уменьшится. В блоке управления такой резистор подключается через специальный ключ.
Для работы с датчиком движения используются два порта микроконтроллера. Pin_Move - вход, куда подключен выход датчика. НИЗКИЙ уровень - лента неподвижна, ВЫСОКИЙ уровень - лента движется. Pin_Tmc - выход управления постоянной времени. НИЗКИЙ уровень - малая постоянная времени (режим перемотки, MOVE_FAST), ВЫСОКИЙ уровень - большая постоянная времени (режим рабочего хода, MOVE_SLOW).
При использовании электронного счетчика можно отказаться от штатного датчика движения ленты. Счетчик определяет движение гораздо быстрее, так как использует квадратурный энкодер под крыльчаткой правого обводного ролика. За один оборот ролика сменяется 20 состояний (для крыльчатки, имеющей 5 лопастей), поэтому определение остановки ленты детектируется очень быстро (не более 130 мс даже при минимальной скорости ленты 4.76 см/с). В этом случае нет необходимости переключать постоянную времени.
БУ формирует ряд логических сигналов для управления аудиотрактом магнитофона. Это сигнал включения записи (REC), блокировки УВ (MUTE), включения обратного воспроизведения (PLAYR) и прямого воспроизведения (PLAYR). Последний сигнал штатной схемой магнитофона не используется, но присутствует на штатном БУ.
Для минимизации щелчков переключение сигнала реверса всегда производится при включенной блокировке. При реверсировании ведущего двигатель блокировка остается включенной до окончания разгона. Несмотря на все меры, щелчки остаются, хоть и ослабленные. Для полного их устранения требуется переделка плат аналоговой электроники.
Каждая из кнопок управления подключена к отдельному выводу микроконтроллера, что позволяет обойтись от процедуры сканирования и снижает уровень помех, излучаемый платой БУ.

В штатном БУ для подсветки кнопок использовались сверхминиатюрные лампочки накаливания, что являлось существенным минусом ввиду их малого срока службы. В новом БУ используются светодиоды. Кнопки управления имеют окошки, закрытые зелеными светофильтрами (кроме кнопки "Запись", где светофильтр красный). Цвет светодиодов выбирается согласно цвету светофильтров. Светодиоды подключены к отдельным выводам микроконтроллера, что позволяет обойтись без динамической индикации и снизить уровень помех.
У каждого светодиода может быть 5 состояний:
- 1. Выключен.
- 2. Включен.
- 3. Медленно мигает.
- 4. Нормально мигает.
- 5. Быстро мигает.
Частота мигания и коэффициент заполнения для каждого из режимов задается константами в исходном тексте программы.
На плате нового БУ установлен звуковой излучатель, который генерирует звуковые сигналы при включении питания и при нажатии кнопок.
Звуковой излучатель (без встроенного генератора) через транзисторный ключ подключен к выводу PB7 (выход таймера OC2). Активный уровень - ВЫСОКИЙ. Таймер работает в режиме CTC с предделителем частоты на 256. При включении генерации звука включается режим Toggle OC2 on Compare Match. При выключении генерации звука включается режим Clear OC2 on Compare Match.
Штатный БУ поддерживал проводное ДУ, для чего на плате был установлен разъем ШР-10, доступный на задней панели магнитофона. Проводное ДУ актуально при использовании магнитофона в студии, а для домашнего использования, где чаще всего в эксплуатации лишь один магнитофон данного типа, удобней ИК ДУ. Доработка штатного БУ для добавления ИК ДУ уже описывалась здесь.
В новом БУ датчик ИК ДУ установлен между кнопками "Пауза" и "Реверс", где в оригинале было свободное место. Для датчика требуется проделать в панели отверстие и закрыть его темным стеклом. Если резать панель нежелательно, тогда можно вынести приемник ДУ в любое удобное место.
Для ИК ДУ используется код RC-5. Номер системы и коды команд (коды кнопок ДУ) заданы в отдельном файле remcodes.hpp. При невозможности перекомпиляции исходников поменять номер системы и коды кнопок с помощью редактора прямо в HEX-файле. Подробнее про пульт ДУ можно посмотреть здесь
Новый БУ имеет разъем XP, куда выведены сигналы последовательного порта. Через переходник (например, на основе микросхемы FT232RL) БУ может связываться с компьютером для отладки, задания значений параметров, снятия графиков работы ЛПМ и т.д. Специальная управляющая программа Reel.exe позволяет осуществлять полное управление магнитофоном. Ниже показан скриншот главного окна этой программы (кликабельно):

Обмен компьютера с БУ происходит по протоколу Wake, скорость обмена 19200 бод, длина слова 8 бит, контроль четности не используется. Список команд, их коды и назначение отдельных параметров можно найти в файле port.hpp.
- Светодиод STOP горит при загруженной ленте (нет сигнала ДО), если ленты нет - не горит. Во время торможения двигателями светодиод STOP быстро мигает.
- Светодиод PLAY быстро мигает во время разгона ведущего двигателя. Когда разгон завершен - мигает медленно, индицируя текущее направление вращения. При работе в режиме PLAY - горит постоянно. В режиме CUE (откат или архивная перемотка без отвода ленты от головок) быстро мигает.
- Светодиоды FFD и REW мигают во время архивной перемотки. Во время обычной перемотки горят постоянно.
- Светодиод PAUSE может гореть или мигать в режиме паузы, это выбирается опцией "Pause LED Blink".
- При включении питания светодиоды тестируются, для чего все они включаются на 1 сек., затем гаснут и переходят к нормальной индикации. В конце тестирования генерируется звуковой сигнал.
- Кнопка PAUSE работает как триггер: первое нажатие включает паузу, следующее выключает. Выключать паузу может также кнопка PLAY, если задана опция "Play Pause Off".
- Кнопка REC срабатывает только при совместном нажатии REC + PLAYF. При этом сразу начинается запись. Если задана опция "Rec Auto Pause", то при включении REC автоматически включается пауза. Запустить запись можно нажатием кнопки PAUSE или PLAYF (если задана опция "Play Pause Off").
- Кнопка FFD и REW включает перемотку вперед и назад соответственно. Если задана опция "Use Archive Wind", то сначала включается архивная перемотка (светодиод перемотки при этом мигает), а следующим нажатием - обычная (светодиод перемотки при этом горит). Еще одно нажатие снова возвращает архивную перемотку через остановку ленты.
- Кнопка ROLLBACK включает откат в режиме воспроизведения. Лента перематывается в обратном направлении, пока удерживается кнопка. Если задана опция "Use Archive Wind", то используется архивная перемотка, иначе - обычная. Если задана опция "Roll-Back Cue", то при откате лента не будет отводиться от головок (только если используется архивная перемотка). Если задана опция "Wind Cue Enable", то нажатие кнопки ROLLBACK будет подводить ленту к головкам в режиме архивной перемотки. При отпускании кнопки лента снова будет отводиться.
- Пульт ДУ вместо двух кнопок PLAYF и PLAYR имеет одну кнопку PLAY и кнопку REVERSE. Текущее направление вращения ведущего вала индицируется мигающими светодиодами PLAY. Именно в этом направление будет запущен ЛПМ при нажатии кнопки PLAY на пульте ДУ. Кнопкой REVERSE можно поменять направление движения ленты или направление вращения ведущего вала (в режиме STOP или PAUSE).
- На пульте ДУ предусмотрена кнопка MUTE, которой в любой момент можно включить блокировку УВ.
- При нажатии на кнопки генерируется звуковой сигнал (короткий beep). Его можно отключить, если выбрать опцию "Beeper Disable".
- STOP (стоп): боковые двигатели выключены, тормоза включены, ролик отведен, отвод ленты выключен, MUTE включен. Переход в этот режим делается с помощью торможения двигателями.
- PAUSE (пауза): полностью совпадает с STOP, только в этом режиме MUTE выключен.
- PLAYF (воспроизведение вперед): ролик подведен, ведущий вал вращается в прямом направлении, подмотка/подтормаживание работает, отвод ленты выключен, MUTE выключен. Натяжение поддерживается с каждой стороны по своему датчику. При старте режима кратковременно увеличивается натяжение с принимающей стороны и уменьшается с подающей для уменьшения колебаний натяжения. В рабочем режима натяжения слева и справа могут быть установлены разными.
- REC (запись): полностью совпадает с PLAYF, только включен тракт записи.
- PLAYR (воспроизведение назад): совпадает с PLAYF, только ведущий вал имеет другое направление вращения.
- FFD (перемотка вперед): ролик отведен, отвод ленты включен, MUTE включен. Правый боковой двигатель (M2) питается напряжением 100 В. Левый боковой двигатель (M1) регулируется натяжением справа.
- REW (перемотка назад): зеркально совпадает с FFD.
- AFFD (архивная перемотка вперед): ролик отведен, отвод ленты включен, MUTE включен. Правый боковой двигатель (M2) регулируется правым датчиком, ограничивая натяжение ленты. Левый боковой двигатель (M1) также регулируется правым датчиком, создавая натяжением ленты. Натяжение для принимающего двигателя устанавливается больше, чем для подающего. Предусмотрен быстрый переход из архивной перемотки в обычную.
- TR_AREW (архивная перемотка назад): зеркально совпадает с TR_AFFD.
Имеются следующие опции автостопа, которые можно включить или выключить с помощью сервисной программы:
Pre-Tension Autostop Enable: разрешает автостоп при предварительном натяжении ленты перед включением любого режима. Если натяжение не будет обнаружено за время, заданное параметром Pre-Tension AS, сработает автостоп. Если автостоп по пред. натяжению отключен, то пред. натяжение не производится.
Low-Tension Autostop Enable: разрешает автостоп по натяжению. В случае падения натяжения тут же сработает автостоп. Начальная задержка после включения режима задается параметром Low-T/Move AS. В режиме рабочего хода контролируются оба натяжения, в режиме перемоток - только с приемной стороны. Автостоп по натяжению срабатывает максимально быстро, катушки даже не успевают раскрутиться после окончания ленты.
Move Sensor Autostop Enable: разрешает автостоп по датчику движения ленты (ДД). Если движение ленты остановится, сработает автостоп. Начальная задержка после включения режима задается параметром Low-T/Move AS.
Motor Brake Autostop Enable: разрешает автостоп при торможении. Если торможение длится дольше, чем задано параметром Motor Brake AS, сработает автостоп. Дополнительно в режиме торможения работает автостоп по натяжению, перед началом торможения его таймер перезапускается.
Автостоп по датчику окончания ленты (ДО) включен всегда, кроме режима предварительного натяжения ленты. Начальная задержка после включения режима задается параметром Low-T/Move AS.
Логика работы автостопа по ДО следующая: он срабатывает в том случае, если датчик "видел" ленту, но она исчезла. Если изначально датчик ленту "не видит", это не мешает нормальной работе. Благодаря этому можно запускать аппарат с прозрачного ракорда или вести перемотку, заправив ленту над блоком головок. Даже в этом случае при окончании ленты будет останов - сработают другие виды автостопа.
Чтобы ДО не реагировал на повреждения рабочего слоя ленты, склейки, полоски на ракорде, производится фильтрация сигнала датчика с постоянной времени Tau, которая задается в виде параметра.

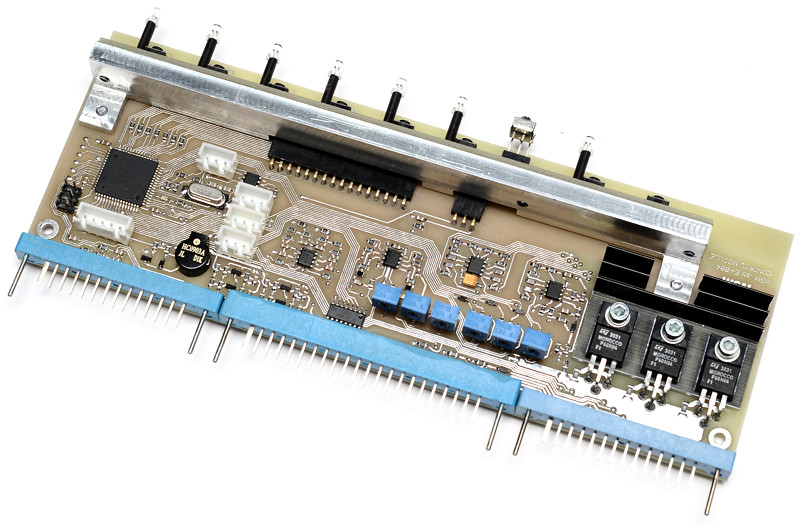
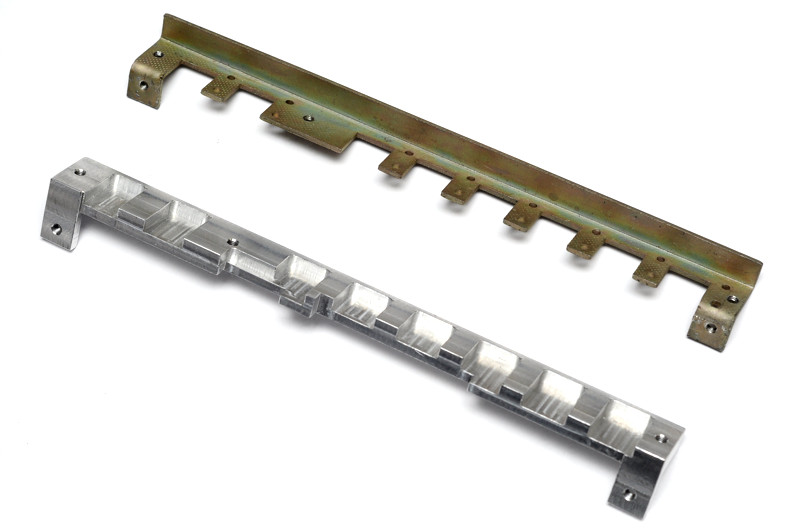
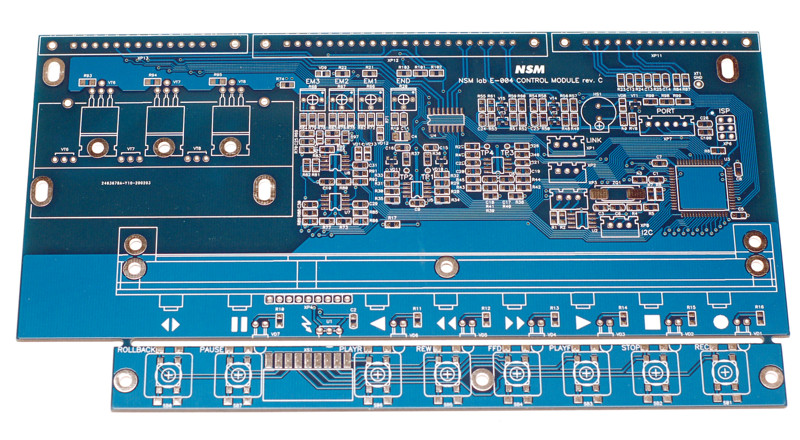
Конечный вариант разводки платы сделан так, чтобы максимально упростить механические детали. Для крепления платы кнопок в макетном варианте был использован фрезерованный уголок сложной формы. Этот уголок был конструктивно совместим с штампованным кронштейном оригинальной платы. Позже плата кнопок была переделана в одностороннюю, что позволило применить уголок без выборок. Изготавливается деталь из стандартного алюминиевого уголка 15х10х2. Надо отрезать кусочек длиной 174 мм, затем просверлить 6 отверстий и нарезать резьбу М3. Можно обойтись и без резьбы, если применить гайки. Но такой вариант будет менее удобным в сборке. В плате сохранена возможность установки штатного кронштейна платы кнопок.
На плате БУ установлены транзисторы генераторов тока для питания электромагнитов. Для их охлаждения требуется радиатор. На плате предусмотрены 3 варианта радиатора. Чтобы избежать необходимости применения изолирующих прокладок, используются транзисторы в изолированном корпусе TO-200 Full Pack. Подойдут практически любые n-p-n транзисторы Дарлингтона в таком корпусе. Список возможных замен есть в файле BOM из архива с файлами PCAD.
Первый вариант - использование вертикального ребристого радиатора. Максимальная длина с ребрами - 20 мм, максимальная ширина - 70 мм, высота - 30 мм. Для его изготовления подойдет, например, отрезок профиля BLA-033-50 или HS172-30. Радиатор можно дополнить креплением, если в подошве проделать два глухих отверстия и запрессовать туда штыри, которые впаять в плату (отверстия для них предусмотрены). Но и крепления только на транзисторах вполне достаточно.
Второй вариант - горизонтальный радиатор. Высота вместе с ребрами не должна превышать 14 мм. Ширина радиатора, как и предыдущего, может быть от 50 до 70 мм. Длина - до 35 мм (если применяется штатный кронштейн кнопок) или до 45 мм (если применяется новый кронштейн кнопок из уголка). Недостатком этого варианта является необходимость фрезеровки площадки для установки транзисторов.
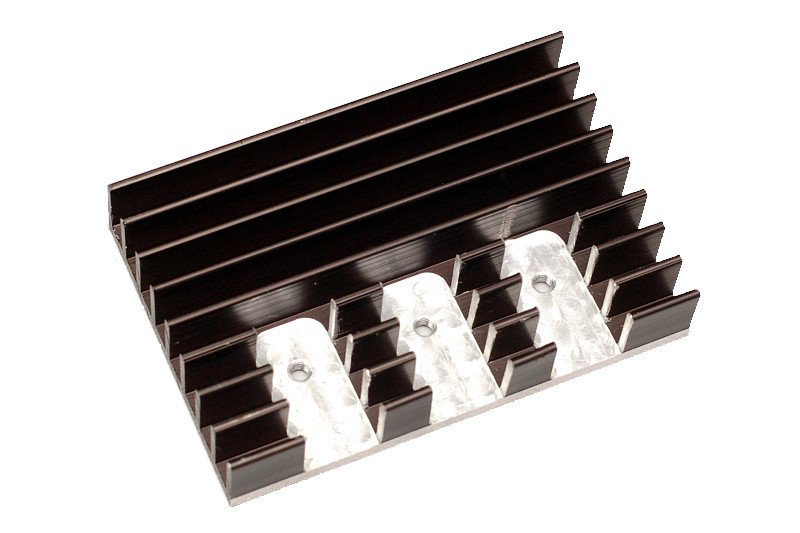
Третий вариант радиатора - это уголок, через который тепло сбрасывается на шасси ЛПМ магнитофона. В этом случае транзисторы впаиваются в другие отверстия, которые расположены ближе к плате кнопок. Сверху радиатор винтами М4 крепится к шасси ЛПМ в двух точках под ведущим двигателем, где крепится кронштейн платы БУВД. Этот кронштейн можно оставить, закрепив его поверх уголка. А с новой платой БУВД он вообще не нужен. Недостатком такого варианта радиатора является затрудненная регулировка положения платы вперед-назад для установки номинального зазора толкателей кнопок. Имеет смысл сначала выполнить эту регулировку, перемещая винты крепления уголка в пазах, и только затем впаять транзисторы.
Список комплектующих можно найти в архиве control_pcad.zip. На плате БУ предусмотрен ряд элементов для дальнейших доработок. При сборке базовой версии, которая устанавливается в магнитофон вместо штатной платы БУ и не требует никаких переделок аппарата, на плате некоторые компоненты устанавливать не надо. Это C26, R1, R2, R4, R5, R7, R8, R29, R31, R84, R87, R90, R98, R99, R100, R101, U2, XP1, XP2, XP3, XP8.
Для некоторых компонентов имеется ряд замен. Транзисторы 2SC5476 можно заменить на 2SD1825, BDW93CFP, KSD1589, BU806FI, 2SD1409, 2SD1276, 2SD1415, 2SD1417, 2SD1589, 2SD1794, 2SD2025, 2SD2101, 2SD2495. Все перечисленные транзисторы имеют изолированный корпус. Если применить изолирующие прокладки, то список расширяется, можно применить дешевые TIP122 или TIP112. Диоды BAT54 можно заменить на BAT54C, BAT54S. Вместо ОУ LM358D лучше применить что-то более качественное, например, AD8542AR, MCP6002-I/SN, TS922ID. Подстроечные резисторы 3362P фирмы Bourns можно заменить на любые аналогичные, например, 3362S, 3329H, PV32H, СП3-19А, СП3-19Б. Можно поставить и многооборотные типа 3296, но смысла в этом нет, точность регулировок здесь не требуется. Звуковой излучатель подойдет любой динамический без встроенного генератора диаметром 9 мм. На схеме указан излучатель HC0903A на 3 В, который включен через резистор. Подойдет излучатель и на 5 В. Фотоприемник TSOP1836 можно заменить любым другим с несущей частотой 36 кГц. Можно применить и с другой несущей частотой, но тогда чувствительность будет меньше. Надо только убедиться, что выводы расположены правильно (1 - выход, 2 - земля, 3 - питание), так как бывают разные варианты. Тактовые кнопки управления должны иметь высоту 4.3 мм. Предусмотрена установка как кнопок размером 12х12 мм (DTSM-2), так и кнопок размером 6х6 мм (DTSM-6).
Плата БУ имеет меньшие размеры, чем штатная. Поэтому ее точки крепления не совпадают. Для крепления новой платы можно в верхнем экране БМЭ проделать два отверстия, куда ввернуть резьбовые стойки высотой 9.5 мм. Можно обойтись и без сверления, а просто приклеить самоклеющиеся площадки для кабельных стяжек, на которые надо заранее установить резьбовые стойки высотой 5 мм.
Прошивка микроконтроллера ATmega64 осуществляется любым последовательным программатором, поддерживающим этот кристалл. Для подключения программатора на плате имеется 6-контактный разъем XP6. Файл прошивки Control.hex можно найти в архиве control_source.zip. Внутри папок для каждой версии есть папка \Debug\Exe\, где и находится файл прошивки. В качестве программатора я использую самодельный клон STK-500. Если установлен пакет AVR Studio, то этот программатор поддерживает прошивку из командной строки. Достаточно запустить файл Prog.bat, который содержится в папке вместе с прошивкой, как будет записана и сама прошивка, и фузы. Если пользоваться другим программатором, тогда фузы придется выставлять вручную. Вот так фузы выглядят в AVR Studio:
Значение фузов: Ext = FF, High = C1, Low = AF. Установленный фуз EESAVE означает, что при прошивке не будет стираться содержимое EEPROM. Т.е. если были сделаны какие-то настройки, они не будут потеряны при обновлении версии. Если появится необходимость загрузить все параметры по умолчанию, то в сервисной программе надо нажать кнопку Def, затем Save to Eeprom.
Для настройки БУ желательно использовать сервисную программу (хотя в крайнем случае можно обойтись и без этого). Для подключения БУ к компьютеру понадобится любой переходник USB-TTL. Я использую самодельный переходник на микросхеме FT232RL с гальванической развязкой. Можно использовать переходник и без развязки, но тогда с подключенным переходником невозможно делать измерения тракта магнитофона аудиокартой компьютера из-за помех. Во время измерений придется связь компьютера и БУ отключать, что не всегда удобно - ведь с компьютера есть возможность полного управления всеми режимами магнитофона. Все файлы по самодельному переходнику (схему, плату, gerber, файл для lut) можно найти в архиве usb-ttl_pcad.zip. Можно взять и готовый переходник, они широко продаются на Aliexpress, как с развязкой, так и без. На каком чипе он собран - не имеет значения, лишь бы виделся в системе как виртуальный COM-порт.
Для подключения переходника USB-TTL на плате БУ имеется разъем XP7. Он сделан 5-контактным, так как у меня такие на всех переходниках. Контакт DIR используется переходником RS-485 для переключения направления, в данном случае он не нужен. Готовые переходники обычно имеют 3 или 4 контакта (GND, RXD, TXD, иногда питание). Питание на переходник может подаваться со стороны БУ, поэтому при реализации гальванической развязки иметь изолированный преобразователь напряжения на переходнике не обязательно. Исходя из сказанного, на плате БУ лучше установить вместо разъема XP7 просто ряд штырьков.
Для нормального функционирования БУ критично значение напряжения питания +5 В. Поэтому перед настройкой следует проверить и отрегулировать это напряжение с погрешностью не более 0.2 В.
После прошивки можно приступать к проверке и настройке платы. Для этого надо подключить ее через переходник к компьютеру и установить связь. В сервисной программе надо нажать кнопку Connect. Будет выведен список доступных COM-портов. Напротив порта, куда подключен БУ, будет выведено название устройства.
Надо выбрать порт с устройством E-004 и нажать OK. В статусной строке программы (в левом нижнем углу) должна появится надпись ON LINE: E-004 (COM6). Это значит, что связь установлена. Теперь можно проверять управление всеми узлами магнитофона.
1. Проверить управление ведущим двигателем. Если в группе Capstan переключать Reverse, то двигатель должен реверсироваться. Там же можно задать время ожидания разгона двигателя (по умолчанию оно 2000 мс).
2. Проверить работу электромагнитов. В группе Solenoids есть возможность включить или выключить каждый электромагнит. Проверку надо делать без ленты. Для каждого электромагнита вращением подстроечного резистора R66, R67 и R68 надо найти точку отпускания, затем несколько увеличить ток для надежного удержания. Время стартового импульса для электромагнитов тоже задается из сервисной программы. Обычно достаточно 500 мс, но если в электромагнитах применяется демпферная смазка, может потребоваться это время увеличить.
3. Проверить работу датчика движения ленты (Move Sensor). При вращении правого обводного ролика должна появляться галочка Move, а при остановке - пропадать.
4. Проверить работу датчика окончания ленты (Tape End Sensor). Если перекрыть световой поток датчика, должна появляться галочка Tape Loaded. Настройка порога датчика окончания ленты производится подстроечным резистором R20 на плате БУ. Эту регулировку можно сделать и без сервисной программы. Светодиод "Стоп" горит только в том случае, если БУ "видит" ленту. Ориентируясь на него можно подобрать порог так, чтобы ракорды определялись как отсутствие ленты. Со штатным датчиком с лампочкой это возможно далеко не для всех ракордов. Ситуация улучшается в случае применения ИК-подсветки.
5. Самая главная регулировка - датчики натяжения. Прежде всего, надо настроить пружины натяжителей, чтобы при отклонении рычагов на угол -10° относительно горизонтального положения натяжение ленты составляло 70 гс. Это соответствует вертикальной силе, приложенной к рычагу, примерно 110 гс. Проверить ее можно с помощью динамометра. В принципе, здесь можно положиться и на заводскую настройку, если натяжители никто не трогал.
В отличие от штатного БУ, где натяжение ленты регулируется подстроечными резисторами на платах датчиков натяжения, здесь регулировка производится с сервисной программы. Подстроечными резисторами на платах датчиков натяжения лишь надо выставить полную шкалу АЦП в положении полностью опущенных натяжителей. Вращая подстроечные резисторы, надо добиться показаний натяжения (в полях Tension) в пределах 1…4%. Больше эти резисторы трогать не надо. Возможна настройка и без сервисной программы, тогда при полностью опущенных натяжителях надо выставить напряжение примерно 2.56 В на контрольных точках TP1 и TP2 платы БУ.
В первую очередь надо установить натяжение для режима торможения двигателями. В этом режиме фактическое натяжение ленты справа и слева обязательно должно быть одинаковым, чтобы лента находилась в равновесии. Натяжение задается в полях Brake. Из-за некоторого различия характеристик датчиков равное натяжение может достигаться при немного разных установленных значениях, хотя обычно достаточно задать одинаковые числа. Обычно натяжение устанавливается таким же, как и для рабочего хода (по умолчанию 25%). Для проверки торможения двигателями при заправленной ленте надо в группе Spool выбрать Mode = SPOOL BRAKE, при этом включатся боковые двигатели. Затем включить электромагнит Brake Solenoid. Лента должна оставаться неподвижной, а натяжители должны принять положение примерно -10°. После чего этот режим можно выключить: сначала электромагнит тормозов, затем установить Spool Mode = SPOOL OFF.
Для режима рабочего хода сервисная программа позволяет устанавливать разные натяжения слева и справа. Это при желании позволяет добиться баланса натяжений на ведущем узле (с учетом трения ленты в рабочей зоне) и минимизировать детонацию. Для прямого хода натяжения задаются в полях PlayF, для реверса - в полях PlayR. По умолчанию все натяжения заданы 25%, что соответствует отклонению натяжителей примерно в положение -10°. Для проверки натяжения можно включить рабочий ход вручную. Сначала включить подмотку и подтормаживание Spool Mode = SPOOL PLAYF, затем включить электромагнит Brake Solenoid, затем Press Solenoid. Выключение - в обратном порядке. Но проще нажать кнопку Play вверху справа, последовательность включения будет такая же, как и с передней панели магнитофона.
Все кнопки режимов фактически дублируют кнопки управления ЛПМ на передней панели магнитофона. При этом в реальном времени отображается состояние всех узлов магнитофона, а действующее в данный момент задание натяжения в окне программы подчеркивается. Реальное натяжение отображается в полях Tension, реальное напряжение на моторах в полях Motors. Эти значения можно вывести на график, если нажать кнопку снятия графиков Start Log. Названия всех кнопок выводятся в виде подсказок, если наехать на них мышкой.
Для режимов перемотки (FFD и REW) можно задать только одно значение натяжения, так как принимающий двигатель в этом режиме не регулируется. Обычно оно задается таким же, как и для рабочего хода, или немного ниже.
Для режима архивной перемотки (AFFD AREW) натяжение на подающей стороне всегда должно быть меньше, чем на принимающей. Значения этих натяжений надо подобрать экспериментально, чтобы перемотка работала при любом диаметре рулона, но в то же время натяжение не было слишком большим. В полях Autostop задают нижний порог натяжения, после которого срабатывает автостоп. Заданные значения должны быть больше тех, которые индицируются в полях Tension при полностью опущенных натяжителях.
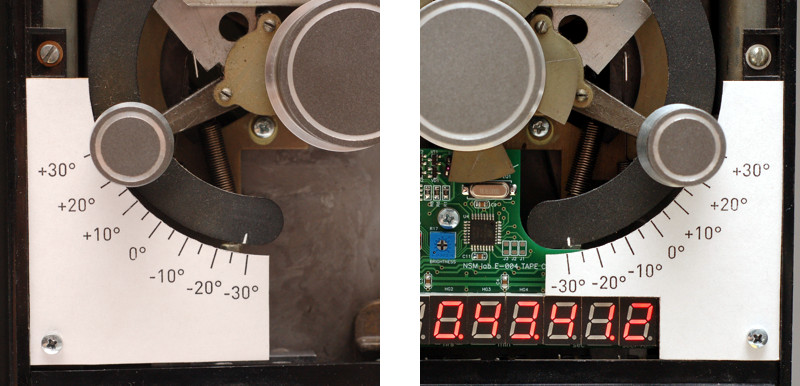
Удобнее всего настраивать натяжение, временно закрепив возле рычагов натяжителей шкалы. Эти шкалы можно изготовить на принтере. В архиве control_corel.zip есть изображения шкал в виде cdr и pdf. Их надо распечатать в масштабе 1:1 (рядом указаны размеры, которые надо контролировать). Для печати лучше взять самоклеющуюся бумагу, но можно и обычную, которую потом надо приклеить на картон и вырезать по контуру. Шкалы закрепляются возле левого и правого рычагов натяжителей с помощью винтов М3 (используются точки крепления передней панели). При полностью опущенных натяжителях на них наносится светлая риска напротив деления -30°.
В случае незатухающих колебаний натяжения может понадобиться корректировка коэффициентов PID. Процесс установления натяжения при переключении режимов удобно наблюдать на графиках. По умолчанию коэффициенты PID имеют значения Kp = 60, Ki = 30, Kd = 30.
В группе Audio - ручное управление аудиотрактом магнитофона: Mute PB Amp. - включение блокировки УВ, Reverse Channel - включение реверсного канала УВ, Record - включение режима записи.
Сервисная программа позволяет задавать значения параметров. Большинство из них вряд ли потребует корректировки по сравнению с дефолтными значениями, но сделать это при необходимости можно.
- Capstan Startup - время ожидания разгона ведущего двигателя.
- Solenoids Startup - время стартового импульса электромагнитов.
- Tape End Sensor Tau - задержка срабатывания датчика окончания ленты.
- Pre-Tension Autostop Enable - разрешение автостопа на этапе пред-натяжения ленты.
- Low-Tension Autostop Enable - разрешение автостопа при падении натяжения ленты.
- Move Sensor Autostop Enable - разрешение автостопа по датчику движения ленты.
- Motor Brake Autostop Enable - разрешение автостопа на этапе торможения двигателями.
- Pre-Tension AS - задержка автостопа на этапе пред-натяжения ленты.
- Low-T/Move AS - задержка автостопа при падении натяжения или остановке ленты.
- Motor Brake AS - задержка автостопа на этапе торможения двигателями.
- Pause Blink - светодиод паузы мигает, иначе - горит.
- Rec AutoPause - кнопка записи автоматически включает паузу.
- Show Direction - направление вращения ведущего вала индицируется медленным миганием Play.
- Beeper Disable - запрещение звуковых сигналов.
- Archive Wind - разрешение архивной перемотки при первом нажатии FFD и REW.
- Arch. Wind Cue - разрешение обзора (кнопкой отката) при архивной перемотке.
- Roll-Back Cue - обзор в режиме отката.
- Auto Reverse - бесконечный автореверс.
- Prog. Enable - разрешение программирования следующего режима (удержанием стоп).
- Prog. Blink - следующий режим в очереди мигает, иначе - горит.
Опции наиболее активно меняются в процессе пробной эксплуатации программы, изменения будут описаны в разделе "История версий".
1. Один из недостатков аппарата заключается в том, что ведущий двигатель постоянно работает. Устранить это можно реализаций режима SLEEP. На пульте можно выделить отдельную кнопку, кроме того, можно реализовать автоматический переход в этот режим, когда некоторое время магнитофон не используется. Выключение ведущего двигателя можно осуществить через плату кварцевой стабилизации. Потребуется доработка программы микроконтроллера и прокладка дополнительного провода от БУ к УУВД.
2. Еще один недостаток - при реверсировании ведущего двигателя формируется фиксированная задержка, которая никак не связана с реальным временем разгона двигателя. Можно завести на БУ сигнал захвата ФАПЧ, который формирует плата кварцевой стабилизации. Потребуется доработка программы микроконтроллера и прокладка дополнительного провода от БУ к УУВД.
3. Электронный счетчик можно связать с БУ с помощью цифрового линка, который предусмотрен на их платах. Тогда можно реализовать поиск нуля, поиск по времени (абсолютный и относительный), а также автореверс по времени (для катушек без ракордов). Также на дисплей счетчика можно выводить служебную информацию, например, коды диагностики.
4. Программно несложно реализовать ряд режимов автореверса. Но возникает вопрос - чем управлять и как индицировать. Возможен вариант с механическим переключателем, его положение как раз будет индикатором. Но установка такого переключателя требует вмешательства во внешний вид магнитофона, что нежелательно. Другой способ - управление с пульта. Но тогда остается вопрос с индикацией. Как вариант - новый индикатор уровня с дополнительными светодиодами режимов. Еще на индикаторе можно выводить текущую скорость ленты, тогда кнопку скорости можно применить без фиксации и перебирать по кругу 9 - 19 - 38. Также можно делать индикацию режимов памяти счетчика и автореверса по времени.
5. При условии доработка БП возможно плавное включение перемоток и регулировка их скорости. А также ограничение максимального натяжения ленты в режиме перемотки.
6. Если добавить датчики скорости и направления вращения на боковые узлы, можно запретить обратное вращение катушек при окончании ленты. Еще можно попытаться на основе скорости вращения боковых узлов и обводного ролика вычислить номер катушек и сделать замедление перемотки в конце ленты.
VERSION 1.00
+ Первый релиз. Работает на плате Rev. A.
Сервисная программа 1.00
+ Первый релиз.
VERSION 1.01
+ Работает на плате Rev. A.
+ Изменены значения опций по умолчанию.
+ Оптимизировано время выполнения нескольких функций.
+ Для TSoftTimer добавлен параметр UseAutoreload, который позволяет отключить
режим Autoreload, если он в проекте не используется.
+ Исправлена ошибка отключения автостопа по пред. натяжению.
+ Добавлен режим автореверса.
Сервисная программа 1.01
+ Добавлена опция Auto Reverse для разрешения автореверса.
VERSION 1.02
+ Работает на плате Rev. A.
+ Класс TSoftTimer сделан шаблонным, параметр задает тип таймера:
TT_PLAIN, TT_AUTORELOAD, TT_ONESHOT. Для каждого типа оптимизирован
метод Over(). Исправлен алгоритм запуска и остановки таймера. Теперь
после создания таймер всегда остановлен. Для любого типа в этом состоянии
метод Over() возвращает false.
+ Изменен алгоритм торможения при автостопе. Механические тормоза включаются
всегда и сразу, чтобы получить максимально быструю остановку (чтобы для
торможения хватило длины ракорда или чтобы катушки не вращались свободно, если
лента закончилась). Параллельно работает торможение двигателями.
Если есть натяжение ленты, то ожидается ее остановка, после чего убираются
лентоотводы. Затем после подтягивания петли через некоторое время выключается
торможение двигателями.
Если натяжения нет, значит лента закончилась, лентоотводы убираются сразу и
ожидание остановки не производится, так как свободный обводной ролик может
долгое время вращаться по инерции.
VERSION 1.03
+ Работает на плате Rev. A.
+ Добавлен режим программной работы, частным случаем которой являются режимы
Auto Play и Auto Rewind. Если в режиме Stop нажать и удерживать кнопку Stop, то загораются
кнопки режимов, одну из которых можно нажать для программирования первого шага.
Это кнопки PLAYR, REW, FFD, PLAYF. После нажатия одной из этих кнопок загораются
кнопки режимов, одну из которых можно нажать для программирования второго шага.
Если на первом шаге было нажато PLAYR или REW, то горят FFD, PLAYF, PAUSE.
Если на первом шаге было нажато FFD или PLAYF, то горят REW, PLAYR, PAUSE.
После второго нажатия через 3 сек. аппарат включает первый режим, а после
срабатывания автостопа - второй режим. Например, если хотим перемотать ленту в
начало и запустить воспроизведение (Auto Play), надо нажать STOP, REW, PLAYF.
Если хотим после воспроизведения перемотать ленту в начало (Auto Rewind), надо
нажать STOP, PLAYF, REW. И так далее. Работающий режим постоянно горит,
(если это не архивная перемотка) а следующий режим медленно мигает.
Чтобы вместо архивной перемотки работала обычная, при программировании
кнопку REW или FFD надо нажать подряд два раза. Например, чтобы ленту
перемотать вперед на обычной перемотке и назад на архивной, надо нажать
STOP, FFD, FFD, REW. Если в процессе программирования нажать STOP,
программа сбрасывается. Если войдя в программирование не нажимать
никаких кнопок, то через 3 сек. программа сбрасывается. Если при
выполнении программы нажать кнопку любого режима, программа
сбрасывается.
Сервисная программа 1.03
+ Добавлена опция Prog. Enable для разрешения программной работы.
+ Опция Prog. Blink позволяет выбрать режим индикации режима,
который ожидает включения, миганием или постоянным свечением.
VERSION 1.04
+ Работает на платах Rev. A и Rev. C.
+ Добавлена опция Show Dir, которая включает индикацию направления
вращения тонвала медленным миганием светодиода PlayF или PlayR.
+ Изменена логика работы автореверса (и программного режима).
Теперь автореверс срабатывает только в том случае, если автостоп сработал
по датчику окончания ленты. Если автостоп сработал по другим причинам
(отклонение натяжения, остановка движения ленты), то автореверс не включается.
+ Изменен алгоритм поддержания натяжения в режиме архивной перемотки для
подающего двигателя. Теперь ограничение натяжения происходит по обоим датчикам
натяжения, в результате ни справа, ни слева натяжение не может превышать
заданного.
+ Изменены значения коэффициентов PID по умолчанию.
+ Изменена логика работы режима "Pause". Оригинальную логику работы так и не
удалось реализовать, теперь логика приближена к фирменным аппаратам: режим
"Pause" всегда выключается при нажатии "Play".
+ Другие мелкие правки.
Сервисная программа 1.04
+ Добавлен вывод заданных значений натяжения (R1 и R2).
VERSION 1.05
+ Изменены задержки при включении режима Play.
+ Изменен способ предустановки PID-регулятора перед включением режима.
+ В режиме Stop, когда боковые двигатели выключены, PID-регуляторы
теперь продолжают работать, чобы на момент включения режима они содержали
актуальные значения переменных регулирования.
+ Коэффициенты PID изменены, теперь по умолчанию 70, 30, 40.
Такие значения уменьшают колебания натяжения ленты в переходных режимах
и улучшают качество регулирования. Но при этом есть риск потери устойчивости.
Коэффициенты 60, 30, 30 дают лучшую устойчивость и при необходимости
могут быть заданы вручную.
С новыми коэффициентами есть смысл уменьшить постоянную времени фильтров PWM.
Для этого надо изменить номиналы резисторов в фильтрах:
R42-R45 (82 кОм) на 33 кОм, R38, R39 (150 кОм) на 62 кОм, R40, R41 (160 кОм)
на 68 кОм.
+ Внесены изменения в сервисную программу, теперь она может отображать
6 графиков (добавились графики установленног онатяжения R1 и R2).
+ Версия сервисной программы сделана равной версии прошивки (1.05).
Сервисная программа 1.05
+ Версия сервисной программы сделана равной версии прошивки.
VERSION 1.06
+ Изменена работа с АЦП. Теперь период выборок равен 100 мкс, данные АЦП
считываются в прерывании по концу преобразования. При том же периоде
дискретизации PID (4 мс) получается более высокий коэффициент оверсемплинга,
что снижает шум дифференцирования. Одновременно наблюдается лучшая устойчивость.
+ Номиналы компонентов в фильтрах изменены:
R38-R39 33 кОм, R40-R41 36 кОм, C17-C18 100 нФ, R42-R43 68 кОм,
C19-C20 100 нФ, R44-R45 33 кОм, C21-C22 3.3 нФ.
+ Коэффициенты PID изменены, теперь по умолчанию 100, 40, 45. Такие
коэффициенты будут работать только с новыми номиналами в фильтре!
+ Изменен набор опций по умолчанию (включено больше функций).
VERSION 1.07
+ Исправлена ошибка чтения АЦП. Раньше при запущенной сервисной программе
и разных установленных значениях натяжения слева и справа были выбросы натяжения.
+ Добавлена передача номера версии в команду GetInfo.
Сервисная программа 1.07
+ Добавлена возможность сохранять параметры в файл par и считывать из него.
Для этого добавлены новые пункты меню Device->Open Params... и Device->Save Params...
Формат файла par - текстовый, как у ini-файла.
+ В строке состояния добавлен вывод номера версии прошивки .
Сервисная программа 1.08
+ В строке состояния добавлено новое состояние CONNECTING...
Когда порт открыт, но БУ не включен, программа периодически пытается
установить связь. При этом интерфейс немного подтормаживает. Когда надо
с программой работать автономно, следует закрыть порт (нажать Disconnect),
тогда в строке состояния появится OFF LINE.
+ Добавлен вывод номера версии в заголовок окна.
Сервисная программа 1.09
+ Изменен способ чтения списка портов, теперь для запуска программы
не требуются права администратора.
Сервисная программа 1.10
+ Улучшена работа окна Connect, добавлена кнопка Refresh для обновления
списка портов.
Сервисная программа 1.12
+ Изменено расположение контролов в окне программы, чтобы уменьшить минимальную
высоту окна. Это актуально для экранов ноутбуков и нэтбуков (например,
1366 x 768, 1600 х 900).
VERSION 1.20
+ Установка коэффициентов PID сделана раздельной для левого и правого моторов.
+ Добавлена опция Motor Braking, которая позволяет выбрать торможение двигателями
или механическими тормозами.
+ Добавлена опция Mute Pause, которая указывает, включать или нет Mute на паузе.
+ Добавлена опция Play > Rec Enable, которая разрешает переходить на запись во
время воспроизведения.
+ Добавлена опция Rec > Play Enable, которая разрешает переходить на
воспроизведение во время записи.
+ Добавлена опция Play Exits Pause, которая разрешает кнопкой Play выключать
режим паузы.
VERSION 1.21
+ Не работает автореверс по маленьким прозрачным окнам (порядка 1..2 см): чтобы
такое окно было видно, постоянную времени датчика надо ставить маленькой
(например, 35 мс). При остановке ЛПМ окно проходит мимо датчика и перед ним
снова находится лента (или непрозрачный ракорд). При старте в другую сторону
тут же обнаруживается переход лента-ракорд, снова происходит реверс. И так по
кругу. Для устранения проблемы при срабатывании автореверса вызывается
специальный метод ArDel(), который увеличивает задержку реакции на ракорд
для ДО до значения EndTau + 300 мс. Задержка увеличивается только при реверсе,
по команде от кнопок она остается прежней, в результате после ручного
пуска автостоп срабатывает быстро.
+ Сделана новая таблица кодов кнопок для пульта RM-E195 с новой платой.
Сделаны варианты прошивки для разных номеров систем пульта.
+ Добавлена таблица кодов кнопок для пульта RC-63CD с новой платой.
VERSION 1.22
+ Вместо вывода Pin_PlayF назначен вывод Pin_Test, который служит для включения
тестового генератора. Пока управление этим выводом не реализовано, на нем всегда
НИЗКИЙ уровень.
VERSION 1.23
+ Коды пультов помещены в отдельную папку remcodes.
+ Все опции компиляции теперь в файле main.hpp (выбор пульта).
+ В модуле transport.cpp добавлены задержки 300 мс перед отпусканием тормозов.
VERSION 1.24
+ Во время реверсирования ведущего двигателя боковые двигатели выключаются и
включаются механические тормоза. В предыдущих версиях ожидание реверсирование
было в режиме торможения двигателями.
+ Уменьшена задержка перед отпусканием тормозов до 100 мс.
+ Уменьшена задержка после убирания лентоотводов с 400 до 250 мс.
+ Добавлена возможность задания номера системы ДУ RC-5 с сервисной программы.
Номер системы задается в десятичном формате.
VERSION 1.25
+ Добавлена поддержка пультов с кодировкой NEC. Выбор RC-5/NEC делается
при подключении соответствующего файла с таблицей кодов кнопок пульта.
Номер системы может задаваться в таблице (для RC-5 в виде 1 байта,
для NEC - в виде 2 байтов) или передаваться из сервисной программы и сохраняться
в EEPROM. Если из сервисной программы задать номер FFFF, тогда он будет читаться
из таблицы. Такой вариант задан в прошивке по умолчанию.
+ Изменен алгоритм торможения ленты: если движения нет, или нет натяжения,
двигатели в режим торможения не включаются.
+ Время торможения ленты ограничено значением параметра AsBrkDel. Иначе при
неисправном датчике движения ленты наблюдалось бесконечное торможение.
+ Добавлено запоминание в EEPROM последнего направления ведущего вала.
При включении магнитофона это направление восстанавливается, если заправлена
лента.
+ Если во время архивной перемотки нажать СТОП, включится торможение двигателями,
и скорость перемотки начнет снижаться. Если потом снова нажать перемотку в
ту же сторону, то скорость перемотки снова начнет возрастать (раньше в такой
ситуации перемотка возобновлялась только после полной остановки ленты).
Это дает возможность в некоторой мере управлять скоростью перемотки,
нажимая эти кнопки.
+ При остановке из режима PLAY торможение сейчас всегда делается механически.
Раньше был этап торможения двигателями, что давало лишнюю задержку.
Сервисная программа 1.25
+ Добавлена поддержка работы с пультами с протоколом NEC. Этот протокол
позволяет использовать 16-разрядный номер системы. Теперь ввод номера системы
делается в шестнадцатиричном формате. Для RC-5 вводятся 2 цифры (от 00 до 1F),
для NEC вводятся 4 цифры (от 0000 до FFFF). После ввода числа надо нажать
кнопку Set System, чтобы применить новое значение. Для сохранения его в EEPROM
надо нажать Save to Eeprom. Если задать FFFF, то для обоих протоколов номер
системы будет читаться из таблицы кодов кнопок, которая прошита в ПЗУ
микроконтроллера.
+ Изменена логика управления светодиодами: теперь передается текущее состояние
светодиодов, они повторяют мигание как на панели магнитофона.
VERSION 1.26
+ Добавлена поддержка печатной платы Rev. B (разработчик неизвестен, платы
продавались на Avito). У этой платы некоторые порты микроконтроллера имеют
другое назначение. Также для этой платы заданы другие коэффициенты PID
по умолчанию (60, 30, 30).
+ Исправлена ошибка обработки датчика окончания ленты. При увеличении
постоянной времени для автореверса методом ArDelay() не перезапускался
таймер, в результате после реверса аппарат не видел ленту. Добавление
строчки EndTimer->Start() проблему решило.
+ Добавлен отдельный метод Transport->RestoreRev() для восстановления из EEPROM
направления вращения ведущего вала. Вызывается в конструкторе TControl
сразу (для Э-004), или после задержки 1 сек. (для Э-003, чтобы реле реверса
щелкало с задержкой после включения питания).
+ Не всегда срабатывал автореверс (после ручного изменения направления не
срабатывал). Причиной оказалась проверка BrakeTimer в Op_WaitStop(),
когда эта операция вызывалась в режиме TR_ASTOP. Заменил вызов
на Ops_WaitBrake();