Контроллер шагового двигателя SMC-4100D

Основные характеристики:
| • тип управляемых двигателей | биполярные |
| • напряжение питания | 10..30 В |
| • максимальный ток питания двигателя | 2 А |
| • ШИМ-стабилизация тока обмоток двигателя | |
| • полношаговый и полушаговый режим | |
| • скорость вращения | 1..30 000 полушагов/сек |
| • количество концевых выключателей | 2 (NO или NC) |
| • программное отключение концевых выключателей | |
| • поддержка датчика базового положения | |
| • разгон и торможение с заданным ускорением | |
| • программируемый ток фаз | для разгона, движения, удержания |
| • скорость спада тока | медленная, быстрая |
| • перемещение на абсолютную координату | |
| • перемещение на заданное число шагов | |
| • диапазон абсолютной координаты | ±2 000 000 000 микрошагов |
| • чтение и установка абсолютной координаты | |
| • задание скорости начала разгона | |
| • сохранение параметров в энергонезависимой памяти | |
| • местное управление с помощью кнопок | |
| • программируемые функции кнопок | вращение, шаг, скорость |
| • управление с помощью логических сигналов | |
| • светодиодная индикация режимов работы | |
| • измерение напряжения питания | |
| • управляющий интерфейс | USB |
| • протокол обмена | WAKE |
| • крепление на DIN-рейку | |
| • библиотека функций управления (DLL) |
Описание устройства
Контроллер шагового двигателя SMC-4100D предназначен для работы с биполярными шаговыми двигателями. Управление устройством обеспечивает микроконтроллер ATmega8 фирмы Atmel. Связь с компьютером осуществляется по интерфейсу USB с гальванической развязкой. Вместе с контроллером поставляется библиотека в виде DLL, которая содержит все необходимые для управления устройством функции, а также тестовое ПО. Функции DLL могут быть вызваны из среды LabVIEW или из программы пользователя, написанной на любом языке программирования.
Контроллер обеспечивает работу биполярных шаговых двигателей в полношаговом (FS, full step) и полушаговом (HS, half step) режиме.
Контроллер позволяет устанавливать скорость от 0 до 30000 полушагов в секунду и обеспечивает разгон с постоянным ускорением (трапециидальный профиль скорости). Если задать значение ускорения 0, то будет реализован прямоугольный профиль. Контроллер имеет возможность задавать скорость начала разгона. Задание скорости начала разгона позволяет реализовать для двигателя смешанный профиль скорости. Если двигатель начинает вращение с нулевой скорости, то скорость скачком достигает скорости начала разгона, а дальше двигатель начинает разгоняться с заданным ускорением. При торможении все происходит наоборот: двигатель выполняет торможение с заданным ускорением, пока скорость не снизится до скорости начала разгона. Затем двигатель сразу останавливается. Задание минимальной скорости разгона обычно используется для уменьшения вибраций при разгоне и торможении, которые имеют место при работе двигателя на низких скоростях. Минимальная скорость не накладывает ограничение снизу на устанавливаемую скорость. Просто для скоростей, меньших скорости начала разгона, будет реализован прямоугольный профиль скорости.
Контроллер реализует ШИМ-стабилизацию тока обмоток двигателя. Поэтому ток не зависит от напряжения питания и определяется только заданным значением. Значение тока задается программно. Контроллер позволяет индивидуально задавать рабочий ток, ток разгона и ток удержания. Также имеется возможность измерения напряжения питания.
Контроллер поддерживает обработку относительной и абсолютной координаты. Значение координаты всегда выражается в полушагах. Поэтому при работе с полным шагом возможно лишь более грубое позиционирование. Контроллер имеет счетчик абсолютной координаты емкостью ±2 000 000 000 полушагов. При выполнении команд позиционирования возможно перемещение на абсолютную или относительную координату. При позиционировании осуществляется разгон и торможение согласно заданным значениям скорости, скорости начала разгона и ускорения. Для предотвращения потери координаты в режиме позиционирования должен быть включен ток удержания.
Имеется возможность подключения датчика базовой позиции. В качестве датчика может быть оптопара, датчик Холла или обычный механический выключатель. Программно можно выбрать желаемый активный уровень и действие при достижении базовой позиции: плавное торможение или мгновенная остановка двигателя. Программное обеспечение контроллера содержит специальную функцию базирования, которая позволяет определить координату базовой позиции в микрошагах.
Контроллер позволяет подключить 2 концевых выключателя. Включение и отключение обработки концевых выключателей осуществляется программно. Дополнительно можно задать тип концевых выключателей – нормально-разомкнутые или нормально-замкнутые.
Кроме управления от компьютера возможно местное управление. Для этого предусмотрены сигналы L, R и EN. Имеется 7 различных режимов раборты с сигналами местного управления. Индикация текущего состояния контроллера осуществляется двумя светодиодами.
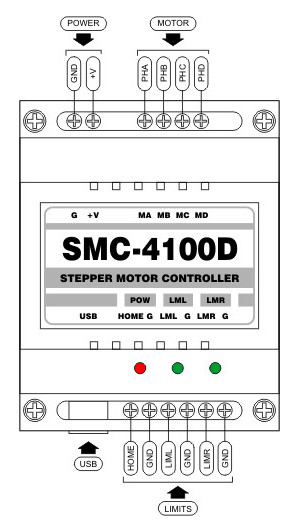
Контроллер конструктивно выполнен на одной печатной плате, которая помещена в корпус типа Z-100, предназначенный для установки на DIN-рейку. Входы и выходы выполнены в виде разъемных клеммников. Для порта USB использован разъем типа USB-B.
Программное обеспечение
Вместе с контроллером поставляется программное обеспечение. Внешний вид окон управляющей программы показан ниже: